|













|
Animatronic FX
Animatronics: The term "audio-animatronics" was
coined by Disney Imagineers in describing their Disneyland
robots. Somewhere along the line, the "audio" portion got dropped,
and the term became descriptive of the use of mechanical and/or electrical
components and systems to simulate and replicate the movements of
creatures, whether replications of existing terran life forms or
fictional creations of fantasy. In other words, animatronics is
a lot of cool robo-stuff that makes our characters come to
life!
The difference between an animatronic creation and a
robot is that today's animatronics are built primarily to perform
and respond in real time to spontaneous and changing control signals.
A robot is a mechanical device that goes through a series of preprogrammed
moves, over and over again. And while certainly some of our animatronics
may be programmed for repetitive playback, the element of puppetry
is needed in the first place to capture that performance.
Also, I haven't met a Director yet who'll be satisfied with
a single version of a performance repeated ad nauseam, whether it
be from a puppet or an actor!
Here at TCS, we're on the cutting edge of animatronic
technology, whether it's coming up with custom built animation
playback systems, pioneering the use of Waldo®
telemetry devices, or spearheading research into new areas,
exploring and testing new types of tools, machines, and exotic
materials. Animatronics is the art of replicating the biological
mechanisms of bone, muscle, and tendon with alloys and polymers,
servos and actuators, kevlar fibers and stainless steel cable. We
substitute electronic sensors, feedback loops, and copper wire for
a body's nervous feedback system. We simulate carbon-and protein
based flesh with synthetic elastomers. Kinda Cybersexy, ain't it?
Select any photo to view
a larger version.
Giant Robot Arm for Ford Focus Spot
 For a Ford Focus spot shot in December 2000, in only two weeks,
we designed, created and delivered a 12 foot long robotic arm. The arm rode
overhead on a suspended gantry and could move 20 feet on the X axis, 10 feet
on the Y axis. It was capable of rotating at the "shoulder", curling its'
upper arm and elbow up, bending at the wrist , and rotating its tool turret.
Several add-on tools allowed it to grasp, pick-up, turn, and manipulate items
such as a tire, engine, speakers, and radio. All functions were worked via
Radio Control and/or puppeteered with external rods
For a Ford Focus spot shot in December 2000, in only two weeks,
we designed, created and delivered a 12 foot long robotic arm. The arm rode
overhead on a suspended gantry and could move 20 feet on the X axis, 10 feet
on the Y axis. It was capable of rotating at the "shoulder", curling its'
upper arm and elbow up, bending at the wrist , and rotating its tool turret.
Several add-on tools allowed it to grasp, pick-up, turn, and manipulate items
such as a tire, engine, speakers, and radio. All functions were worked via
Radio Control and/or puppeteered with external rods
Facehugger from "Aliens"
 Stan Winston contracted me to work on his Aliens
crew. Among other things, I was entrusted with designing and creating
the animatronics to make the face hugger run. After some initial
experiments involving electric- and gas-powered motors, we opted
instead for a wire-spool powered mechanism. A wire would be wrapped
around an internal pulley, extended out front and back, and
pulled taut. A second wire pulled the entire creature, the
internal pulley would turn, turning gears which turned disks which
"rowed", oar-like, the leg shafts. Offsetting the rotation of the
disks gave the creature its spidery walk, and a reciprocating tail
wag completed the mechanism. The leg speed would match the body travel
speed; it could be pulled slowly for a creeping effect, fast for
running; it could even "jump" if the front operator moved his end
of the cable up and down rapidly.
Stan Winston contracted me to work on his Aliens
crew. Among other things, I was entrusted with designing and creating
the animatronics to make the face hugger run. After some initial
experiments involving electric- and gas-powered motors, we opted
instead for a wire-spool powered mechanism. A wire would be wrapped
around an internal pulley, extended out front and back, and
pulled taut. A second wire pulled the entire creature, the
internal pulley would turn, turning gears which turned disks which
"rowed", oar-like, the leg shafts. Offsetting the rotation of the
disks gave the creature its spidery walk, and a reciprocating tail
wag completed the mechanism. The leg speed would match the body travel
speed; it could be pulled slowly for a creeping effect, fast for
running; it could even "jump" if the front operator moved his end
of the cable up and down rapidly.
Clockwise from upper left: Central pulley and gearcase
(note size!), Gear case with "oar" plate, "Oar" plate with unpainted
legs, Finished creature ready to go.
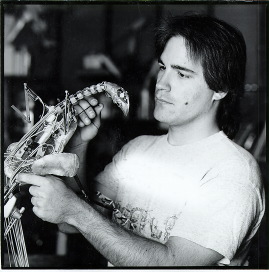
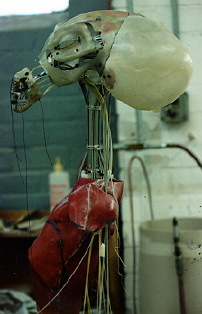
Alien Queen
 My other major responsibility on Aliens
was to design the Queen's inner body animatronics. This picture
shows me assembling the hero Queen head, which featured face
up/down, face side/side, retracting lips, and retracting/extending
inner "tongue", with folding/extending teeth on the end of the tongue.
All were cable controlled, while the neck motions were hydraulic,
as built by Trevor Butterfield. To have been able to design and build
"hero" components on the main creature for such a classic is
something I'll carry with me a long time. I also designed
and built the "curl open" animatronics for the alien eggs on the
film.
My other major responsibility on Aliens
was to design the Queen's inner body animatronics. This picture
shows me assembling the hero Queen head, which featured face
up/down, face side/side, retracting lips, and retracting/extending
inner "tongue", with folding/extending teeth on the end of the tongue.
All were cable controlled, while the neck motions were hydraulic,
as built by Trevor Butterfield. To have been able to design and build
"hero" components on the main creature for such a classic is
something I'll carry with me a long time. I also designed
and built the "curl open" animatronics for the alien eggs on the
film.
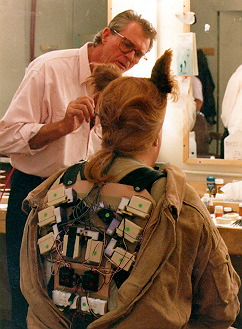
Barf

Here's John Candy, viewed from the back, getting ready for
another day as "Barf" on Spaceballs. His ears
were marvelously mobile, featuring 5 axes apiece, for a total of
10 independent motions. His ears could wave, point, beckon, droop,
and stand to attention. You see the batteries, servos, receivers,
and cable routing that made it all happen, compacted in as small
a package as possible.
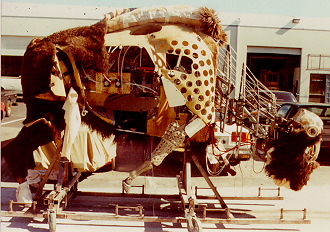
Big Buffalo
 This 8 foot tall animatronic buffalo for Radio
Flyer was my first large-scale animatronic project
after I opened TCS. It featured rod-operated back legs, Waldo® controlled 5-axis front legs, head
up/down, side/side, and rotate, neck up/down and side/side, blinks,
eyes side/side and up/down, brow movement, two-axis jaw (for bovine
chewing), nose "snuffle", working tear ducts, steam-emitting nostrils,
and a vacuum-equipped mouth for eating marshmallows! It was so
huge it needed to be affixed to a crane, for which we engineered
different mounting points for different shots. Its major motions
were hydro-pneumatically powered, with heavy-duty liner actuators
and servos providing the rest of the muscle. It was one of the most
graceful, believable creatures that's ever been done.
This 8 foot tall animatronic buffalo for Radio
Flyer was my first large-scale animatronic project
after I opened TCS. It featured rod-operated back legs, Waldo® controlled 5-axis front legs, head
up/down, side/side, and rotate, neck up/down and side/side, blinks,
eyes side/side and up/down, brow movement, two-axis jaw (for bovine
chewing), nose "snuffle", working tear ducts, steam-emitting nostrils,
and a vacuum-equipped mouth for eating marshmallows! It was so
huge it needed to be affixed to a crane, for which we engineered
different mounting points for different shots. Its major motions
were hydro-pneumatically powered, with heavy-duty liner actuators
and servos providing the rest of the muscle. It was one of the most
graceful, believable creatures that's ever been done.
At the end of shooting, Steven Spielberg requested a
demonstration of its capabilities. As he was walking away after
the demo, he turned to his producer and said "Jurassic Park!" Nice
praise, Steve, but what happened? You gave another guy the show!
<g>
Animatronic chicken

Internal mechanisms for a realistic animatronic skinned
chicken. Featured "tentacle" type neck, beak, blinks, head turn,
working legs and wings. All cable controlled.
"Collector" Alien
 A peek at the internal cable controlled mechanisms I
built for Boss Films' Chevy "Collector" commercial. The little
teeth (or "neemie neemies") at the front had 2 axes per tooth
for 12 axes, controlled by a cable Waldo®,
a snout up/down and side/side, blinks, "unfolding" eye and
rear skull plates, and 5 axes of neck and head movement.
A peek at the internal cable controlled mechanisms I
built for Boss Films' Chevy "Collector" commercial. The little
teeth (or "neemie neemies") at the front had 2 axes per tooth
for 12 axes, controlled by a cable Waldo®,
a snout up/down and side/side, blinks, "unfolding" eye and
rear skull plates, and 5 axes of neck and head movement.
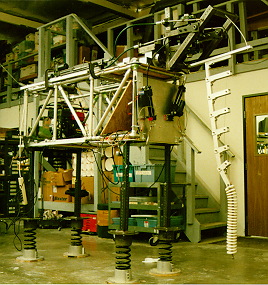
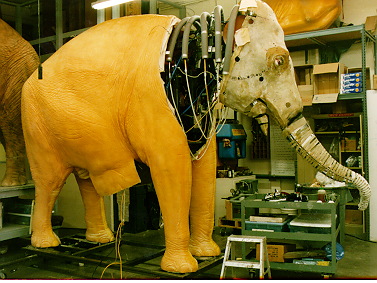
Dumbo
 Internal animatronics for the primary elephant replica
for Operation Dumbo Drop. A rear-mounted
internal generator provided power for on board computer, electric
actuators and servos. Animatronic functions included head up/down,
side/side, and rotate, blinks, eyes side/side and up/down, brow movement,
jaw, tail, and a sinuous, very prehensile 5-axis trunk. The legs
featured steel springs (Ford 150 truck replacements!) as
shock absorbers, which also provided a gentle swaying motion
as well.
Internal animatronics for the primary elephant replica
for Operation Dumbo Drop. A rear-mounted
internal generator provided power for on board computer, electric
actuators and servos. Animatronic functions included head up/down,
side/side, and rotate, blinks, eyes side/side and up/down, brow movement,
jaw, tail, and a sinuous, very prehensile 5-axis trunk. The legs
featured steel springs (Ford 150 truck replacements!) as
shock absorbers, which also provided a gentle swaying motion
as well.

Nearly completed #2 animatronic elephant, showing latex and
polyfoam body skin, neck rings, and fiberglass underskull
and trunk core.

Animatronic elephants #'s 1 and 2 under construction as a
third (non-animatronic) elephant replica awaits a paint job.
Most of the large scale know-how that we needed on this had
already been learned on our Radio
Flyer buffalo, but you do learn something new every job!
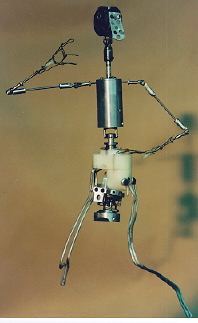
Hocus Pocus Witch

The internal mechanisms that allowed our Sarah Jessica
Parker puppet to move so realistically.
Made of machined aluminum, delrin, and aluminum armature
wire.
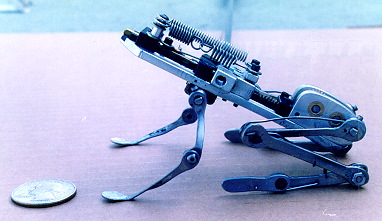
The Santa Clause Reindeer
 Internal mechanism for a miniature animatronic reindeer
we created for Disney's The Santa Clause. Each leg
had 4 axes of movement, all of which were driven cyclically
by a speed-controlled motor. The gait was predetermined, so
the only spontaneous movement was to ramp the leg speed up or down,
as well as movement of the head and neck via external rod. The puppet
was mounted to a motion control pylon, so adjustments in body attitude,
distance from camera, roll, pitch, and yaw were recordable and
repeatable.
Internal mechanism for a miniature animatronic reindeer
we created for Disney's The Santa Clause. Each leg
had 4 axes of movement, all of which were driven cyclically
by a speed-controlled motor. The gait was predetermined, so
the only spontaneous movement was to ramp the leg speed up or down,
as well as movement of the head and neck via external rod. The puppet
was mounted to a motion control pylon, so adjustments in body attitude,
distance from camera, roll, pitch, and yaw were recordable and
repeatable.
 Debra Galvez applies finishing touches to the completed
puppet. It is covered in a foam latex skin, and electrostatically-flocked
animal fibers. The single puppet was composited and multiplied eight-fold
by Buena Vista Visual Effects.
Debra Galvez applies finishing touches to the completed
puppet. It is covered in a foam latex skin, and electrostatically-flocked
animal fibers. The single puppet was composited and multiplied eight-fold
by Buena Vista Visual Effects.
Little Frog
 Note the size of this little marvel? For a Minolta copier
spot, we engineered a tiny cable-powered mechanism that
allowed a tree frog puppet to actually jump and land. A slim rod
attached to the body was eliminated in post-production. We scaled
up this concept for our Bud Frog spot
wherein our hero leaps for his love.
Note the size of this little marvel? For a Minolta copier
spot, we engineered a tiny cable-powered mechanism that
allowed a tree frog puppet to actually jump and land. A slim rod
attached to the body was eliminated in post-production. We scaled
up this concept for our Bud Frog spot
wherein our hero leaps for his love.
Home
What's New | Features | Commercials
| Resume | Realistic
| Whimsical | Scary | Animatronics
| Prosthetics | Puppets | Waldo®
| Publicity | TCS
Fun | FX FAQ | Reference | Feedback
Except where noted, all contents are the property of The Character Shop, Inc. and copyright 1995-2006
|